Artigo número 100: AR.Drone - O robô voador com Linux embarcado
Como este é o artigo número 100 no Viva o Linux, procurei escolher um assunto bem bacana e emergente. Nada melhor que o AR.Drone, que envolve programação, Linux, vídeo captura com visão computacional. Veremos neste documento algumas maneiras de dominar este brinquedo.
[ Hits: 36.513 ]
Por: Alessandro de Oliveira Faria (A.K.A. CABELO) em 02/09/2011 | Blog: http://assuntonerd.com.br

O desenvolvimento: hora do PAU!
Mencionarei neste documento 3 de inúmeras opções para dominar o AR.Drone no que tange a programação e desenvolvimento de soluções com esta aparelho. O SDK oficial, o linguagem URBI e uma iniciativa que permite programa o AR.Drone junto a tecnologia de visão computacional openCV. Viva \o/
Um breve resumo como funciona o AR.Drone:
O desenho abaixo resume bem a arquitetura de funcionamento do AR.Drone. A desaceleração em cada uma das hélices deriva em um determinado resultado. Sem contar no senso ultrassônico e para requintar as câmeras (inferior e frontal).

Existem inúmeros software para o iPhone, iPAD, Android e Nokia. Ressalto que no SDK, encontramos os respectivos exemplos para brincar. Não dá para detalhar o desenvolvimento em todas as plataformas em apenas uma artigo, então ficar para os próximos os assuntos referente à programação. Abaixo um resumo básico das configuração do AR.Drone.
Tilt:
Praticamente ajusta a velocidade horizontal, porém não devemos esquecer da sensibilidade do acelerômetro que interfere nesta aceleração.

Como o próprio nome diz, define velocidade Vertical e claro, por consequência o sobe e desce do aparelho.

Define a velocidade de rotação, ou seja sentido horário ou anti-horário (esquerda ou direita).

Download e instalação do AD.DRONE open API
O SDK oficial devemos obter em:Lá encontraremos a última versão do SDK fórum de discussão entre informações técnicas. Após o download, descompacte os fontes com o comando tar -zxvf conforme o exemplo abaixo.
tar -zxvf ARDrone_SDK_Version_1_8_20110726.tar.gz
$ cd ARDrone_SDK_Version_1_8_20110726/Examples/Linux
$ make
Pronto, nesta etapa o SDK e as bibliotecas estão compiladas a pronto para uso, porém começaremos com algumas dicas.
Para conectar com o AR.Drone, coloque a sua interface de rede em modo Ad-Hoc, informe o nome da rede, desabilite a criptografia e defina o IP.
iwconfig wlan0 mode Ad-Hoc essid [Nome-Rede] key off
$ ifconfig wlan0 192.168.1.5 netmask 255.255.255.0 up
Agora para testar o programa exemplo, entre na pasta Examples/Linux e execute o binário ardrone_navigation.
cd Examples/Linux/
$ ./ardrone_navigation

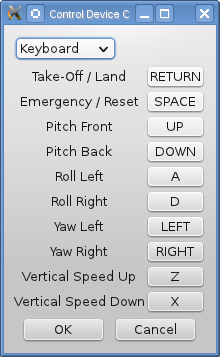
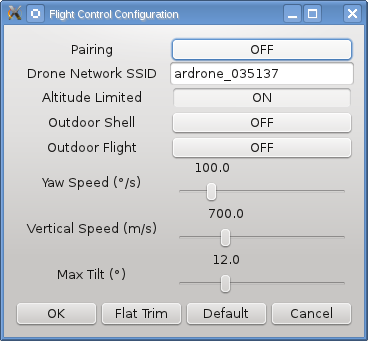
Para visualizar o vídeo das câmeras do ARDrone, entre na opção "Show Drone Vídeo", finalizando para define a configuração de voo, clique em "Flight control settings". Abaixo algumas ilustrações:

Esta plataforma de software está disponível para prover funcionalidade para uma ampla gama de dispositivos, incluindo o cachorro-robô da Sony, o Aibo, o Segway, o Lego Mindstorms NXT, AR.Drone e muitos outros. Mais detalhes, sugiro entrar no site Urbi Forge . Partiremos agora para o para o download e instalação desta opção.
Efetue o download e descompactação do pacote:
wget http://www.psykokwak.com/blog/images/ardrone/urbi-sdk-2.3-linux-x86-gcc4-ardrone-1.0.tar.bz2
tar -jxvf urbi-sdk-2.3-linux-x86-gcc4-ardrone-1.0.tar.bz2
$ cd urbi-sdk-2.3-linux-x86-gcc4-ardrone-1.0/
$ sh start
Se você estiver conectado com o ARDrone e tudo estiver funcionando corretamente, teremos o seguinte resultado no console. Isto significa que estamos prontos para enviar comando para o ARDrone, como o foco deste artigo é demonstrar as opção disponíveis, deixarei a parte de programação para o próximo documento.
Deixo aqui apenas a observação para ficarmos atento ao urbi específica no arquivo start, pois é ele que determina que módulo será executado e por consequência o comportamento do AR.Drone.
[00000121] *** Urbi SDK version 2.3 rev. 9a84600
[00000124] *** Copyright (C) 2005-2010 Gostai S.A.S.
[00000124] ***
[00000124] *** This program comes with ABSOLUTELY NO WARRANTY. It can
[00000124] *** be used under certain conditions. Type `license;',
[00000124] *** `authors;', or `copyright;' for more information.
[00000124] ***
[00000124] *** Check our community site: http://www.urbiforge.org.
[00000124] *** ********************************************************
[00000152] ARDrone_0x83f7130
before setLocale()
before ardrone_tool_setup_com(NULL)
before ardrone_tool_init(...)
Starting thread navdata_update
Starting thread ardrone_control
before ardrone_input_add(NULL)
Input device myControl added
Thread navdata_update in progress...
Starting thread my_video
Thread navdata_update in progress...
Video stage thread initialisation
A interface RAD da empresa Gostai foi o que mais me impressionou, pois com ela é possível arrastar os componentes e montar a sua interface gráfica com apenas alguns cliques. O download deve ser efetuado no link abaixo, logo após descompacte o arquivo e execute o script GostaiLab.sh.
Download:
sh gostai-lab-2.5-linux.sh
$ cd gostai-lab-2.5-linux/bin
$ ./GostaiLab.sh
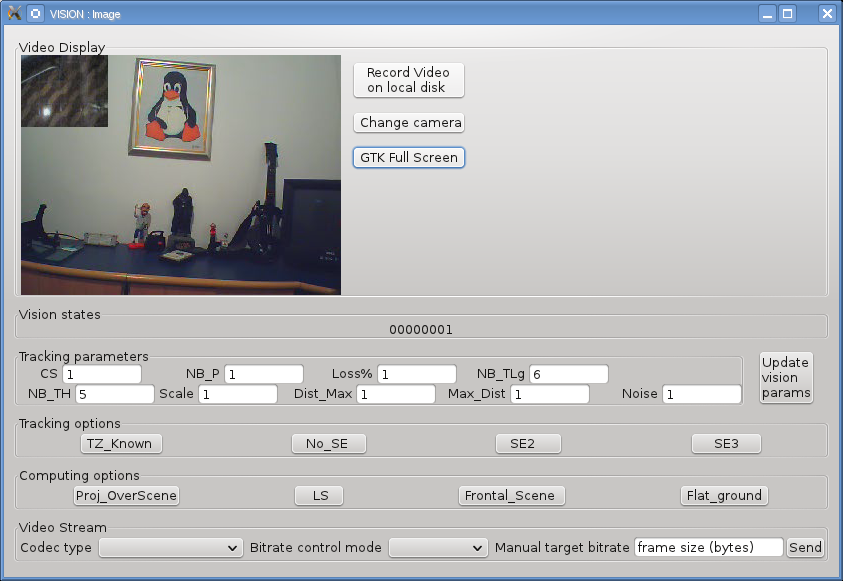
A interface é muito intuitiva, com o script urbi balltracking.u configurado no arquivo start mencionado anteriormente, elaborei uma prova de conceito onde o AR.Drone acompanha o coração vermelho do pinguim.
Para finalizar, Cutedrone
Cutedrone é uma biblioteca escrita em C++ para comunicação com o AR.Drone. Escrita em QT/C++ a biblioteca proporciona uma exemplo em python que permite movimentar o AR.Drone com a face. Mais informações aqui e neste link um vídeo demonstrativo...
Para finalizar, críticas e sugestões: cabelo@opensuse.org
2. O desenvolvimento: hora do PAU!
LINCE - A biblioteca de visão artificial open source
Ångström: Linux em Palmtops, portáteis e embarcados sem mistério
Transforme o seu celular Android em webcam sem fio na plataforma Linux
Compilador Clipper open-source, compile sem problemas os sistemas .PRG no Linux!
IBM Omni Find Yahoo: Um mecanismo de busca corporativa em seu servidor
Instalação do driver Nvidia no Debian e em distros derivadas
Configurando impressora HP692C no Slackware
Criando um serviço de monitoramento de vídeo e detector de presença com sua WebCam no Linux
Fax Modem LG LM I56N no SuSE 10
Grande cabelo !!!
Sempre com suas experiências .... Me divirto lendo teus artigos !
Show de Bola.
Abração.
Caraca, adorei o artigo!!
muito massa!!!
vlw
Uma palavra para definir tudo isso: SHOW!!!!!!!
Parabéns @cabelo, excelente artigo!
[]'s
Parabéns Alessandro!
100 artigos, ufa! Todos de ótima qualidade.
Abraço!
"The difference between men and boys is the price of their toys" (rsrs).
O brinquedo é caro, heim! rs ( http://va.mu/Ezky )
Vejam o vídeo no site do Mag. Luiza. Legal!
Interessante o fato de estar com Linux embarcado.
Diversão garantida na certa.
Muito loko!
Pena que o brinquedinho ta salgado.
Mais que é divertido brincar com ele comandando direto de um Linux.
Parabéns pelo artigo.
Vou cobrar o Ar.Drone no próximo VOL DAY hein!
pelo iphone bem melhor, pra que complicar atoa só por deus e ainda tem gente que gosta desses artigos
@cabelo
Como sempre, excelente artigo.
E a inveja come solta pra cima de você, hein?!
Esquenta não, seu sucesso é garantido!
Tem gente que não tem noção do quão idiota é.........
@izaias
Qualquer coisa "nóis divedi" essa parada no cartão em 256x S/ juros, sô! ;) haha
Muito bom, mas algumas imagens não estão aparecendo?
Cabelo, muito interessante, é um brinquedo para gente grande, podemos dizer...
A muito tempo atrás vi noticias que existia uns brinquedos parecidos com estes, só que distribuindo botnet por ai, rsrsrs...
Vc se lembra? Pelo que me lembro ele quebrava senha das redes wireless e invadia os PC's e ja era...
abraços.
Cabelo muito bom esse brinquedinho ae ....
mais tipo de fosse integrado ao programa que verifica facialmente a fuça de uma pessoa e se fosse possivel tambem verificar a face e3m tempo real e em movimento pow acho que ficaria muito bom , daria para dar um tour no centro da cidade e verificar quem esta em B.A kkkkk
Muito bom... fantástico.. diversão garantida!
To pensando em integrar comando de voz, e ele. hehehe
Caraca, adorei o artigo!!
[img]http://www.nlmlol.info/g.gif[/img]
Muito bom so não ter dinheiro agora pra compra um deste....rs
Muito bom, fiquei curioso para ver o último video mas está "privado"
Patrocínio

Destaques
Artigos
Porque Gentoo semi-binário atualmente (desabafo)
A combinação de WMs com compositores feitos por fora
Audacious, VLC e QMMP - que saudades do XMMS
SUNO OpenSource: Crie um servidor de gerador de música com IA
Dicas
Warsaw para Banco do Brasil no Archlinux
Capturando senha LDAP em texto claro e como proteger usando TLS no Samba 4
Mais uma pós Instalação Arch Linux
Tópicos
Preciso de ajuda com minha pesquisa sobre o Linux Mint (2)
Configuração resolução tela no zorn os 18 (1)
Top 10 do mês
-

Xerxes
1° lugar - 129.657 pts -

Fábio Berbert de Paula
2° lugar - 62.378 pts -

Buckminster
3° lugar - 38.310 pts -

Alberto Federman Neto.
4° lugar - 28.978 pts -

Alessandro de Oliveira Faria (A.K.A. CABELO)
5° lugar - 20.385 pts -

Daniel Lara Souza
6° lugar - 20.028 pts -

edps
7° lugar - 19.466 pts -

Mauricio Ferrari (LinuxProativo)
8° lugar - 19.329 pts -

Sidnei Serra
9° lugar - 17.245 pts -

Andre (pinduvoz)
10° lugar - 14.800 pts
Scripts
A maior comunidade GNU/Linux da América Latina! Artigos, dicas, tutoriais, fórum, scripts e muito mais. Ideal para quem busca auto-ajuda.
Site hospedado por: