Bioloid Control: Robótica virtual em Linux
Como muitas pessoas, acredito que em breve os robôs estarão presentes em nossas vidas como os computadores nos dias atuais. O projeto Bioloid Control disponibiliza um robô virtual permitindo ao usuário estudar alguns conceitos de robótica simulando o Bioloid Comprehensive Kit.
[ Hits: 46.234 ]
Por: Alessandro de Oliveira Faria (A.K.A. CABELO) em 29/07/2008 | Blog: http://assuntonerd.com.br

Introdução
Controlar um robô impõe um certo grau de dificuldade relacionado às necessidades básicas como a auto localização, localização de outros elementos, tomada de decisão, equilíbrio e sustento do próprio corpo (no caso de robôs humanóides bípedes). Sem mencionar a necessidade de integração do projeto mecânico, elétrico e de programação.
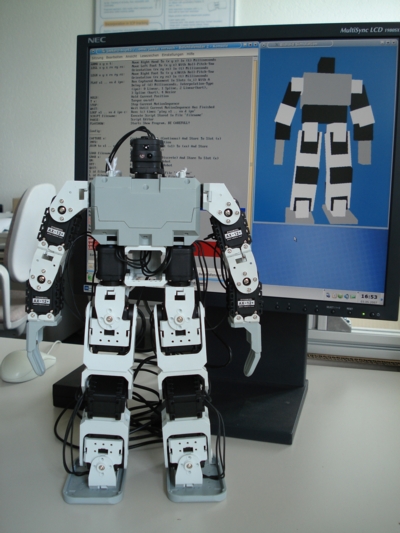

O Bioloid Comprehensive Kit
A robôtis vem comercializando a idéia de "Edutainment robôt", unindo robótica com educação e entretenimento. A evolução entre entretenimento e educação remonta desde brinquedos estáticos, passando pelos jogos de vídeo game e finalizando com os atuais robôs. Estes robôs são os que possuem um maior efeito educacional, já que possuem movimento e permitem maior interação e contato com as pessoas. É por este motivo que a robôtis lançou um robô de entretenimento educacional chamado Bioloid.
Este é o primeiro kit educacional baseado em servomotores controlados pela porta serial. Além de executarem funções básicas como mudar de posições ou girar, os robôs também dispõem de sensores que passam informações sobre velocidade, temperatura, corrente e voltagem de cada servo.
Possuem um hardware compacto e um software livre que pode ser instalado em qualquer computador. O kit é ideal para pesquisas, competições e fins educacionais pelo fato de ter interfaces simples e amigáveis.

Sensor Modelo AX-S1
A comunicação suporta velocidade até 1 Mbps. Possui capacidade de retorno de valores para distância de sensor infravermelho, sensor de luz e de som.
Além disso, posição, velocidade e torque podem ser determinados com um simples pacote de comandos, possibilitando que o processador controle muitos servomotores e sensores com muito pouco recurso.

Servomotor AX-12+
Também tem a habilidade de detectar e agir de acordo com as condições internas, como temperatura ou voltagem. Posição e velocidade podem ser controladas com resolução de 10 bits (1024 passos). Além disso, retorna valores para posição angular, velocidade angular e torque.
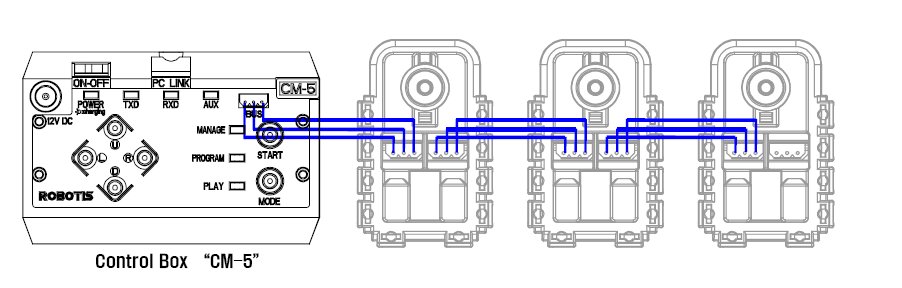
Controlador CM-5
Desenvolvido pela Atmel's, o microcontrolador Atmega128 possui 16Mhz de processamento, 128kbytes de memória flash, 133 instruções, quatro portas seriais, botões de controle e LEDs de status programáveis. A placa de controle se aloja numa resistente caixa de plástico.
Este pode ser atualizado para ser operado sem fio, instalando o módulo Zig-100 Wireless. Instalando dois destes módulos, robôs podem comunicar-se, compartilhar informações e se controlarem.
O módulo Zig-100 trás consigo a tecnologia ZigBee, que consiste em uma rede sem fios ainda em fase de desenvolvimento que pretende realizar a interligação de pequenas unidades de comunicações de dados em áreas muito limitadas, como por exemplo áreas residenciais. Com os principais diferenciais de consumir menos energia elétrica, oferecer maior simplicidade em configuração (topologia de rede variável) e a possibilidade de integração com aproximadamente 6400 dispositivos, com taxas de transmissão compatíveis com as necessidades de equipamentos variados.
Fonte da informação:
http://www.revistas.unifacs.br/index.php/sepa/article/viewFile/306/254
2. O projeto Bioloid Control
3. Download, instalação e configuração
4. Utilizando o Bioloid Control
Camera Kombat: Mortal Kombat ao vivo com WebCam
HairCAPTURE Utilizando captura de vídeo em C++ (sem segredos)
Montando um mirror de atualização do anti-vírus AVG
Transforme seu celular em terminal sem fio SSH/Telnet
Utilize qualquer Tablet/Smartphone como monitor estendido sem fio no GNU/Linux
Configurando a placa wireless LG 2100
Configurando a placa de captura Pinnacle PCTV 110i [chip saa7134] no Slackware 10.2+
Alsa + Esound no Slackware (deixando o som supimpa!)
Muito Bom o artigo. Mais uma vez na Vanguarda. Parabéns!
Abraços
Eu tenho medo de ler estes artigos do Cabelo :s
eheheheh
Muito bom o artigo. Parabéns.
hehe.. Gostei, adoro robótica, e acho que linux, tem muito a crescer nessa area!!
Cara, não sei nem o que falar! simplesmente gostei muito! seus artigos são muito bons, sempre que aparecer algum de sua autoria estarei lendo... Adoro Robótica.. Valew! Parabéns!
Como sempre inovador nos artigos! Parabéns cara! Robotic4Free!
Muito bom! Acho que meu prof de Eletrênica Analógica vai adorar esse programa, se é que ele já não conheçe, o cara é fissurado em robotica, já tem funcionando uns 3 ou 4.
Muito bom mesmo, a galera precisa conhecer essas ferramentas.
Parabéns pelo artigo. primeira
Como o dark falou, também gosto muito de Robótica.
Gostei bastante do artigo, até por ser algo que não costumamos ver normalmente.
---
Renato de Castro Henriques
CobiT Foundation 4.1 Certified ID: 90391725
http://www.renato.henriques.nom.br
Artigo muito bom! Como sempre o cabelo com artigos ótimos!
cara esse careca ai é o cross os artigos dele sao muito boa, só pode se o lula do linux
gostaria de saber se vc tem um projeto de um robo mais simples,controlado por controle remoto...valew
Gostaria de saber como foi feita a construção do Bioloid?
Patrocínio

Destaques
Artigos
Criptografando sua Home com Gocryptfs para tristeza do meliante
A Involução do Linux e as Lambanças Desnecessárias desde o seu Lançamento
O Journal no Linux para a guarda e consulta de logs do sistema
A evolução do Linux e as mudanças que se fazem necessárias desde o seu lançamento
Dicas
Fazendo o controle de Xbox 360 USB funcionar no One Piece Pirate Warriors 4 (Arch Linux/Steam)
Discos que não instalam o sistema por erro MBR/GPT no Linux
Hospedagem de Mangás com Kavita e Docker para Acesso Remoto via Tailscale
Aplicar tema e ícones do Ubuntu Cinnamon no Arch Linux sem AUR
Tópicos
Enquete: qual bloco de código C++ é mais legível? (3)
Instalação do driver Epson L3150 [RESOLVIDO] (5)
Top 10 do mês
-

Xerxes
1° lugar - 152.320 pts -

Fábio Berbert de Paula
2° lugar - 78.143 pts -

Buckminster
3° lugar - 47.403 pts -

Alberto Federman Neto.
4° lugar - 44.379 pts -

Alessandro de Oliveira Faria (A.K.A. CABELO)
5° lugar - 34.485 pts -

edps
6° lugar - 31.979 pts -

Sidnei Serra
7° lugar - 25.529 pts -

Mauricio Ferrari (LinuxProativo)
8° lugar - 24.967 pts -

Daniel Lara Souza
9° lugar - 23.738 pts -

Andre (pinduvoz)
10° lugar - 22.337 pts
Scripts
A maior comunidade GNU/Linux da América Latina! Artigos, dicas, tutoriais, fórum, scripts e muito mais. Ideal para quem busca auto-ajuda.
Site hospedado por: