Controlando Arduino via IRC
Esse artigo tem como objetivo, mostrar como controlar o Arduino via internet de forma simples. Dentro do contexto, será tratado sobre a criação de um botnet em Python, que será responsável em filtrar os comandos digitados no IRC e enviá-los ao Arduino.
[ Hits: 12.763 ]
Por: mrxrobot em 08/12/2014 | Blog: https://notabug.org/mrxrobot_

Instalação / Configuração / Código / Ajustes
Instalando o pyFirmata
O Python não contém no seu conjunto de módulos e bibliotecas o pyFirmata.Para instalar o módulo, utilizaremos o pip.
Abra o terminal e execute o comando:
# pip install pyfirmata
Ou:
# pip2.7 install pyfirmata
Toda a documentação do módulo pode ser encontrada em:
Com o módulo pyFirmata instalado podemos continuar.
Configuração
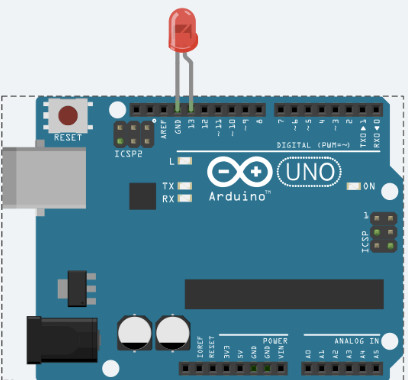
Passos para realizar toda a configuração do Arduino:1. Conectar o LED no pino digital 13 do Arduino:
2. Conectar o Arduino na porta USB.
3. Abrir o IDE do Arduino.
Observação: é necessário executar o IDE como root, só assim o programa terá permissão para reconhecer a porta USB.
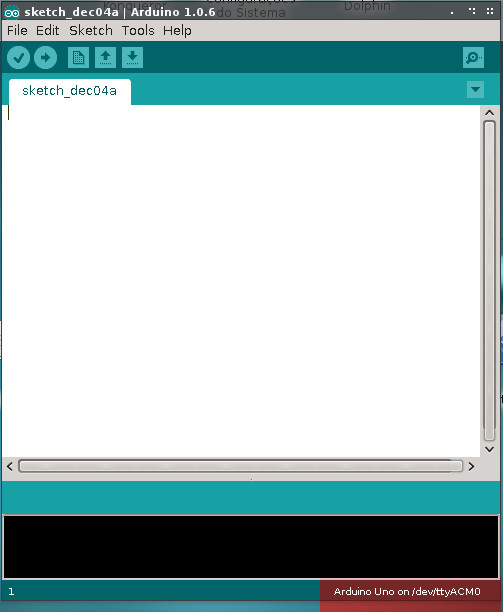
* Atenção: note que a porta que o Arduino está conectado é: /dev/ttyACM0
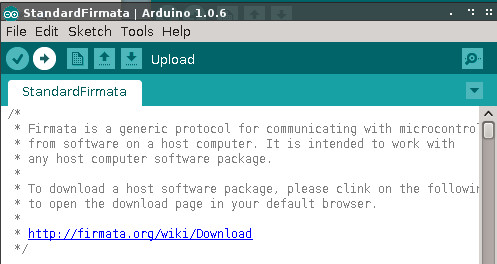
4. Carregar o programa StandardFirmata no Arduino:
No IDE do Arduino clique em: File → Examples → Firmata → StandardFirmata
5. Fazer o upload do StandardFirmata:
Configuração do Arduino finalizada.
Código Python
Estou disponibilizando o código no GitHub também:# -*- encoding: utf-8 -*-
##############################################
# Controlando o arduino via IRC #
# por: Marcos Rodrigues de Carvalho #
# nickname: warlock #
# VOL: www.vivaolinux.com.br/~marcos_warlock #
##############################################
import socket, time, sys
from re import search
from pyfirmata import Arduino
class Controle:
def __init__(self, board=Arduino(raw_input('Informe a porta USB: '))):
self.board = board
def ligar(self):
self.board.digital[13].write(1) # envia sinal 1 para a porta digital 13 do arduino
def desligar(self):
self.board.digital[13].write(0) # envia sinal 0 para a porta digital 13 do arduino
# Cria uma instancia da classe Controle
action = Controle()
# definir o servidor
server = 'irc.freenode.net'
porta = 6667 # port utilizado pelo IRC no linux
canal = '#ControleArduinoPython'
nick = 'Servidor'
senha = 'senha1234'
class Servidor:
def __init__(self):
self.s = socket.socket(socket.AF_INET, socket.SOCK_STREAM)
self.s.connect((server, porta))
self.s.send('NICK %s\r\n' %nick)
self.s.send('USER ' + nick + ' ' + nick + ' ' + nick + ' .:\n')
self.s.send('Join %s\r\n' %canal)
time.sleep(2)
print(self.s.recv(1024))
def testar(self):
self.teste = False
while self.teste != True:
self.msg = self.s.recv(5000)
print (self.msg)
if self.msg[0:4] == 'PING':
self.s.send(self.msg.replace('PING', 'PONG'))
if search('@conectar %s' %senha, self.msg):
self.teste = True
self.s.send('PRIVMSG %s : Conectado com sucesso!\r\n' %canal)
while True:
self.msg = self.s.recv(5000)
print (self.msg)
if self.msg[0:4] == 'PING':
self.s.send(self.msg.replace('PING', 'PONG'))
if search('@ligar', self.msg):
action.ligar()
self.s.send('PRIVMSG %s : Led ligado\r\n' %canal)
if search('@desligar', self.msg):
action.desligar()
self.s.send('PRIVMSG %s : Led desligado\r\n' %canal)
Servidor().testar()
Ajustes finais
Após ter realizado todo o processo de configuração e com o código em mãos, vamos finalizar.Execute o programa como usuário root:
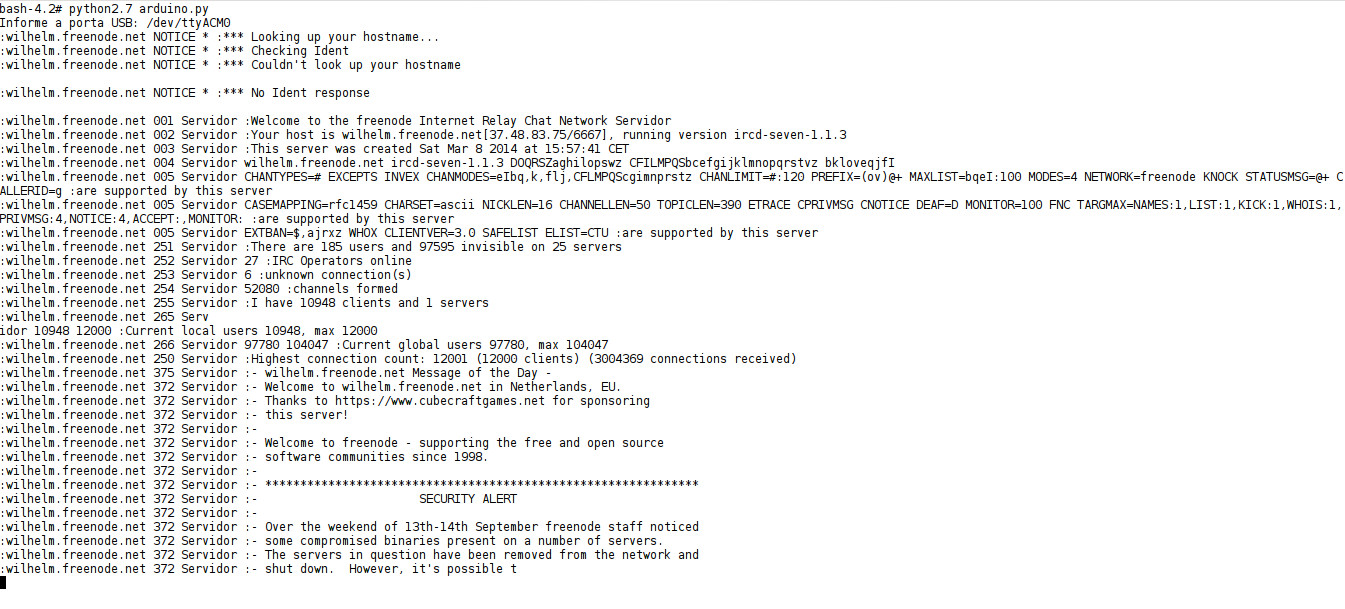
# python2.7 arduino.py
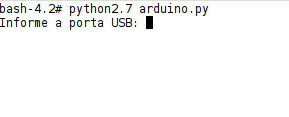
Informe a porta USB, no exemplo, estou usando /dev/ttyACM0.
Acessando o canal do botnet no IRC
Execute no terminal:
irssi
Após o programa abrir, digite os seguintes comandos:
/connect irc.freenode.net
/join #ControleArduinoPython
@conectar senha1234
Feito isso, execute:
- Para ligar o LED: @ligar
- Para desligar: @desligar
Pronto, terminamos!
Críticas e sugestões são bem-vindas!
2. Instalação / Configuração / Código / Ajustes
Introdução ao clib (Command Line Book)
LibreOffice no Slackware - Edição 2017
Arduino - Uma plataforma open source para desenvolvimento de eletrônica
7 melhores práticas para quem é iniciante em Arduino
Aventuras do Mint Linux 10 em um computador antigo
Sensacional! Um dia ainda vou aprender Arduino.
[1] Comentário enviado por fabio em 08/12/2014 - 15:46h:
Sensacional! Um dia ainda vou aprender Arduino.
Aprenda sim. No site do arduino tem toda a documentação incluindo a programação da placa. http://arduino.cc/en/Reference/HomePage
Com o Arduino você consegue desenvolver projetos que sem ele seria bem complexo de ser feito.
Desde que comecei a usar o Arduino não parei mais rsrs. Recomendo a todos do VOL.
Parabéns Marcos. Bem legal o artigo, também gosto de fazer projetos com Arduino.
Patrocínio

Destaques
Artigos
Porque Gentoo semi-binário atualmente (desabafo)
A combinação de WMs com compositores feitos por fora
Audacious, VLC e QMMP - que saudades do XMMS
SUNO OpenSource: Crie um servidor de gerador de música com IA
Dicas
[Resolvido] Jogo Portal fechando
Como configurar cores no prompt do Bash para usuário e root no Arch Linux
Tópicos
Top 10 do mês
-

Xerxes
1° lugar - 136.031 pts -

Fábio Berbert de Paula
2° lugar - 65.120 pts -

Buckminster
3° lugar - 40.500 pts -

Alberto Federman Neto.
4° lugar - 30.794 pts -

Alessandro de Oliveira Faria (A.K.A. CABELO)
5° lugar - 21.596 pts -

Daniel Lara Souza
6° lugar - 21.107 pts -

edps
7° lugar - 20.596 pts -

Mauricio Ferrari (LinuxProativo)
8° lugar - 20.159 pts -

Sidnei Serra
9° lugar - 17.760 pts -

Andre (pinduvoz)
10° lugar - 15.493 pts
Scripts
A maior comunidade GNU/Linux da América Latina! Artigos, dicas, tutoriais, fórum, scripts e muito mais. Ideal para quem busca auto-ajuda.
Site hospedado por: